Antes de empezar, vamos a explicar los componentes que vamos a usar en el código:
- 6 leds como si fueran varios componentes del coche
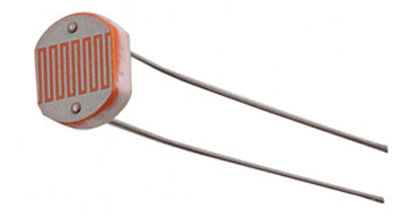
- 2 sensores infrarrojos, uno para el lado izquierdo y otro para el lado derecho.
Para programar el coche, vamos a tener que crear tres variables: la V. velocidad, la V. izquierda ( lo que detecta el sensor de la izquierda) y la V. derecha ( lo que detecta el sensor de la derecha).
La variable velocidad, la vamos a poner a 100 como valor standard, aunque probablemente luego ese valor sea variado.
En cambio, las variables IZQ y DRCH las vamos a poner a 0, por que en el Void Loop las ajustaremos a los valores que dan los sensores:
Habiendo declarado las variables y habiendo puesto sus valores, procederemos a declarar 5 funciones: Parar, avanzar, retroceder, giro_izquierda y giro_derecha.
Primero vamos a declarar la función parar. Para que el coche pare, apagamos todos los motores.
Después vamos a programar la función avanzar. Para que el coche avance, endenderemos el ENA y ENB. Después, ordenaremos hacia qué sentido giran las ruedas apagando y encendiendo los leds.
Ahora vamos a programar la función retroceder. Al igual que en la función avanzar, encendemos el ENA y ENB y ordenamos el sentido de giro de los motores, justo son los contrarios que avanzar.
Ahora vamos a programar los dos giros: a la izquierda y a la derecha. Para programar ambos encendemos el ENA y ENB y ordenamos el giro. Cada rueda girará en un sentido distinto a la otra.
Habiendo declarado las funciones y variables, vamos a proceder a escribir el código del Void Loop. Primero, las variables izquierda y derecha, previamente igualadas a 0, las igualaremos al valor que nos den los sensores infrarrojos de la izquierda y de la derecha.
A continuación, vamos a hacer que avance. En bloques ponemos que si detecta que ambos sensores detectan el color negro, o sea que está dentro del circuito, realice la función avanzar.
Después, vamos a programar los giros por si se sale de la pista. Primero vamos a programar, que si el sensor de la derecha no dtecta negro, que gire a la izquierda, depués programaremos que si el sensor de la izquierda no detecta negro que gire a la derecha.
Por último, vamos a programar que si el coche se sale de la pista y ningún sensor reconoce el color negro, que pare.